Engineers discovered a way to make drones fly faster.

Drones are being tested to see if they can fly faster than ever before while avoiding obstacles with fantastic accuracy.
[ads1]
Drone racing is a relatively new sport in which drones are flown on a track with numerous obstacles, including time. The faster these gadgets pass, however, the more insecure they become. Accidents happen all the time. Of course, if drones could be made faster and more capable, they could be utilized in off-field time-critical activities like hunting for natural disaster survivors.
The Massachusetts Institute of Technology (MIT) has a team of aerospace engineers working on this. They’ve created an algorithm that allows drones to travel as swiftly as possible while avoiding obstacles. If drones are designed for slow flight, it is pretty simple to train them to fly around obstacles. This is because, at low speeds, the rules of aerodynamics are less critical and can be ignored when simulating the drone’s behavior.
However, these effects are far more evident at high rates, and vehicle handling is more difficult to predict. Researchers must do multiple laboratory experiments with drones of various speeds and trajectories to discover which ones fly without crashing to learn how high-speed aerodynamics affect drones in flight. All of this is an expensive and frequently dangerous training process.
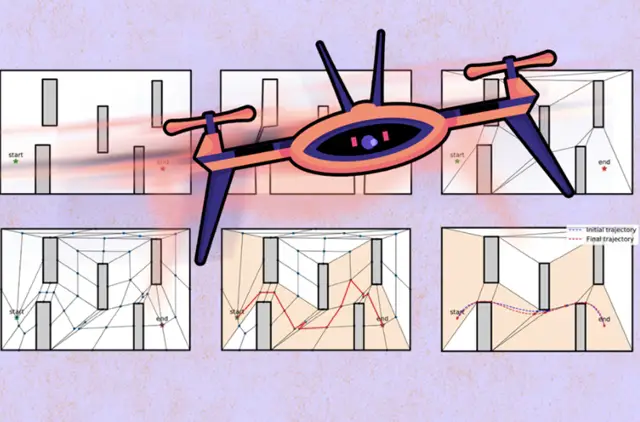
The MIT team adopted a different approach, developing a high-speed flight planning algorithm that reduces the number of failed tries to find quick and safe flight paths. The program integrates the results of drone tests in real-world physical space with simulations of drones flying through a simulated obstacle course.
According to the researchers, the drone trained by the researchers flew up to 20% faster over a short obstacle course than a drone oriented using typical design methods. Surprisingly, the drone’s new algorithm didn’t always keep it ahead of its competitors on the racetrack.
In certain circumstances, he chose to slow down the gadget to negotiate a tight turn or conserve energy, finally speeding up and passing his competitors.
Engineers believe that the algorithm they’re working on will be critical in allowing future drones to navigate risky, obstacle-filled regions rapidly.



